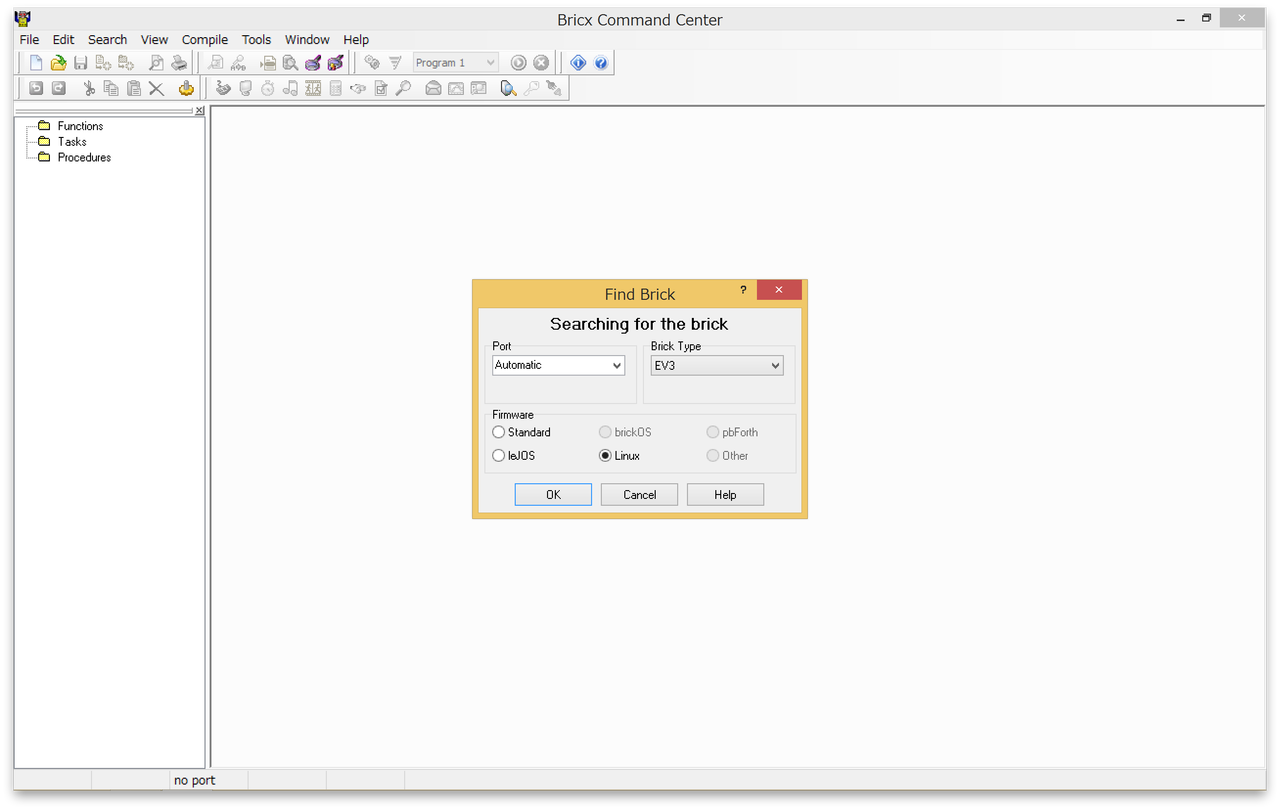
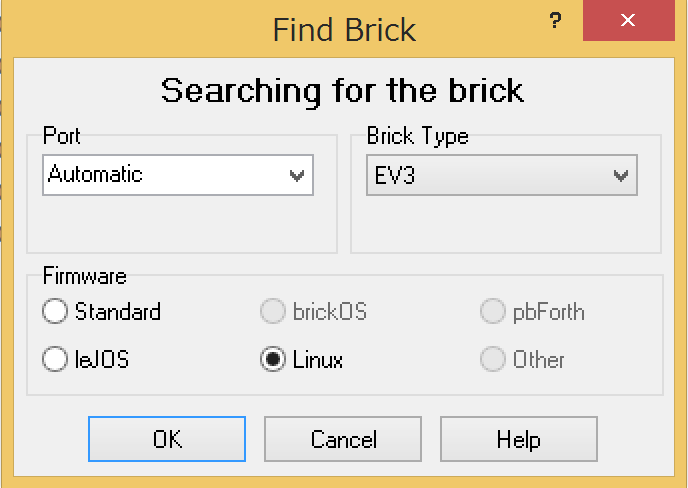
BricxccのEV3対応版のβ版が、公開されていました!!!

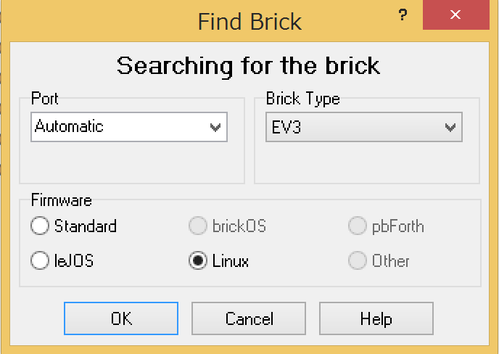
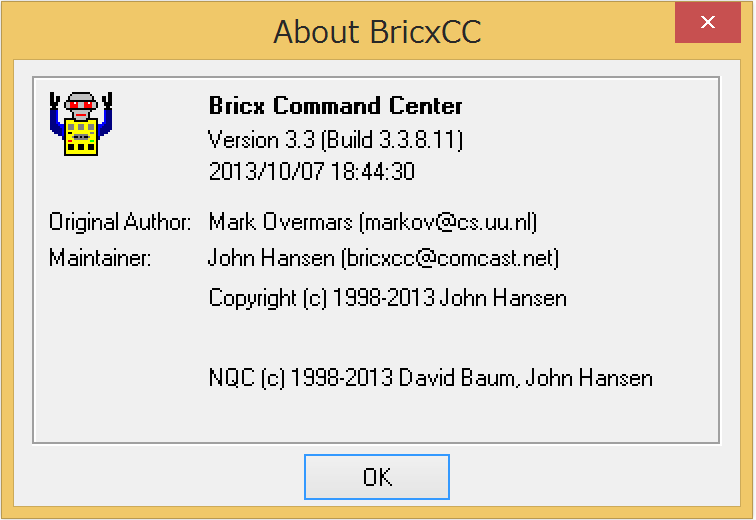
バージョン番号としては、3.3.8.11

かなり前から、公開されていたらしいです...
でも、EV3持っていないので試せない...
誰か、試したら、感触等をコメントで教えてください!!
ダウンロードは、以下から...
http://bricxcc.sourceforge.net/test_releases/
の、「test_release[リリースされた日付].zip」をクリックします。
バージョン番号としては、3.3.8.11
かなり前から、公開されていたらしいです...
でも、EV3持っていないので試せない...
誰か、試したら、感触等をコメントで教えてください!!
ダウンロードは、以下から...
http://bricxcc.sourceforge.net/test_releases/
の、「test_release[リリースされた日付].zip」をクリックします。



